Particle Swarm Optimization
Particle swarm optimization (PSO) is a swarm algorithm. Swarm intelligence relies on emergent behavior of many individuals to solve difficult problems as a collective. Bird flocks are an ideal example of swarm intelligence in nature. When a single bird is flying, it might attempt several maneuvers and techniques to preserve energy, like jumping and gliding through the air or leveraging wind currents to carry it in the direction it wants to travel. This behavior indicates some primitive level of intelligence in a single individual. But birds also have the need to migrate between different seasons. In winter, there is less availability of insects and other food, and suitable nesting locations also become scarce. Birds tend to flock to warmer areas to take advantage of better weather conditions, which improves their likelihood of survival. Migration is usually not a short trip. It takes thousands of miles of movement to arrive at an area with suitable conditions.
When birds travel these long distances, they tend to flock. Birds flock because there is strength in numbers when facing predators; additionally, it saves energy. The formation that we observe in bird flocks has many advantages. A large, strong bird will take the lead, and when it flaps its wings, it creates uplift for the birds behind it. These birds can fly while using significantly less energy. Flocks can change leaders if the direction changes or if the leader becomes fatigued. When a specific bird moves out of formation, it experiences more difficulty in flying via air resistance and corrects its movement to get back into formation.

Rules that guide bird flocks
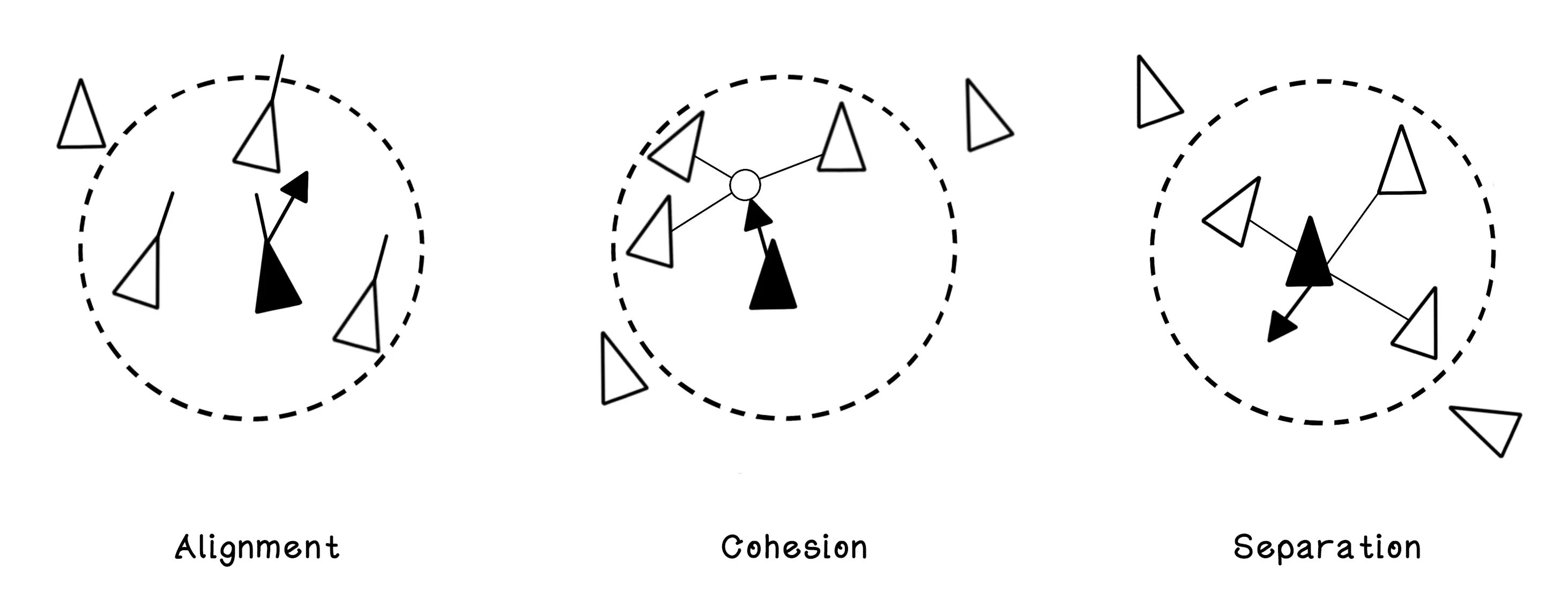
Craig Reynolds developed a simulator program in 1987 to understand the attributes of emergent behavior in bird flocks and used the following rules to guide the group. These rules are extracted from observation of bird flocks:
- Alignment — An individual should steer in the average heading of its neighbors to ensure that the group travels in a similar direction.
- Cohesion — An individual should move toward the average position of its neighbors to maintain the formation of the group.
- Separation — An individual should avoid crowding or colliding with its neighbors to ensure that individuals do not collide, disrupting the group.
A drone problem
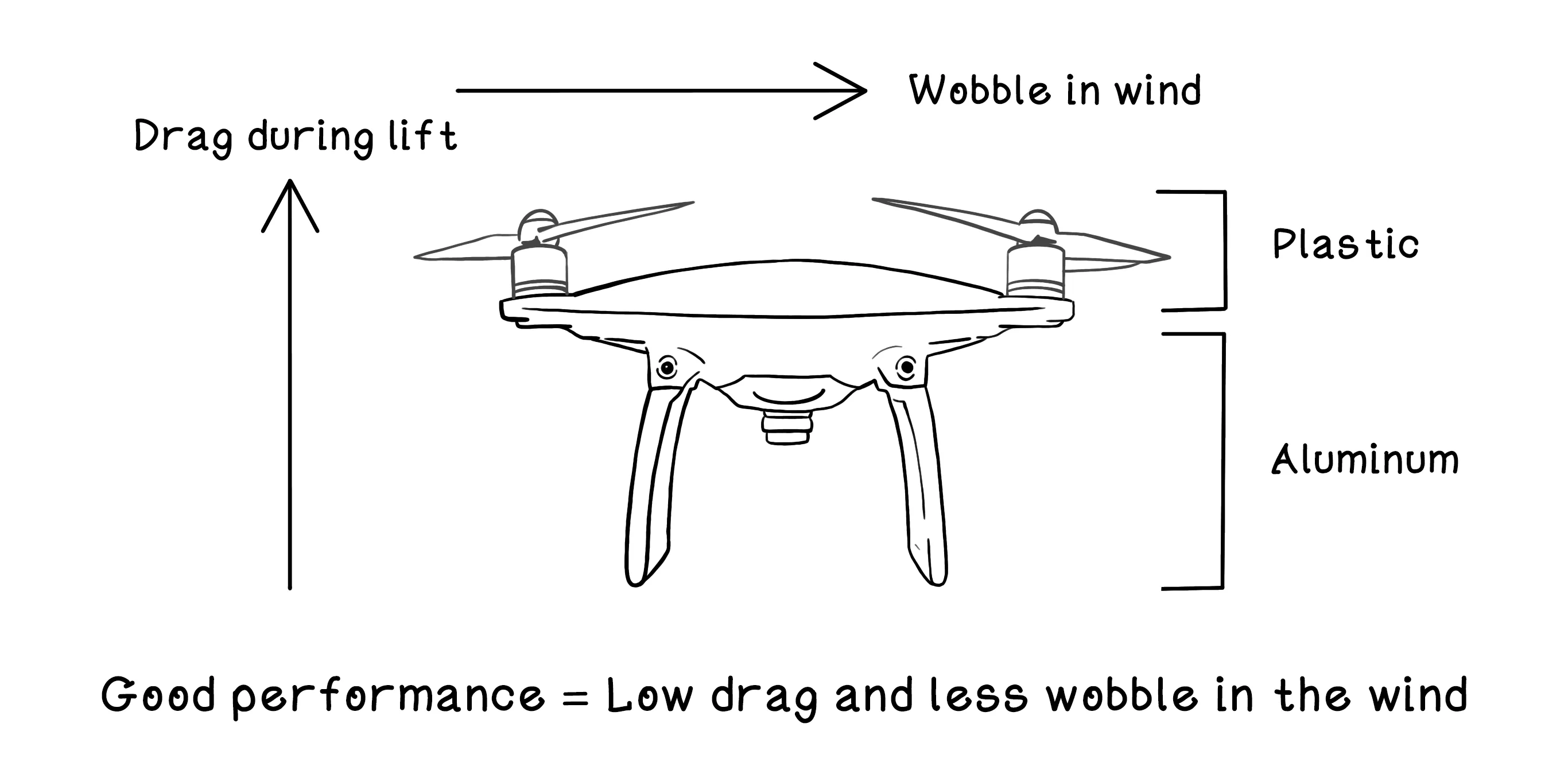
Imagine that we are developing a drone, and several materials are used to create its body and propeller wings (the blades that make it fly). Through many research trials, we have found that different amounts of two specific materials yield different results in terms of optimal performance for lifting the drone and resisting strong winds. These two materials are aluminum, for the chassis, and plastic, for the blades. Too much or too little of either material will result in a poor-performing drone. But several combinations yield a good-performing drone, and only one combination results in an exceptionally well- performing drone.
The important bridge to make here is that particle swarm optimization does not literally simulate a flock of birds. Instead, it borrows the intuition that individuals can move through a search space more effectively when they balance their own discoveries with the best information found by the group.
Particle swarm optimization (PSO)
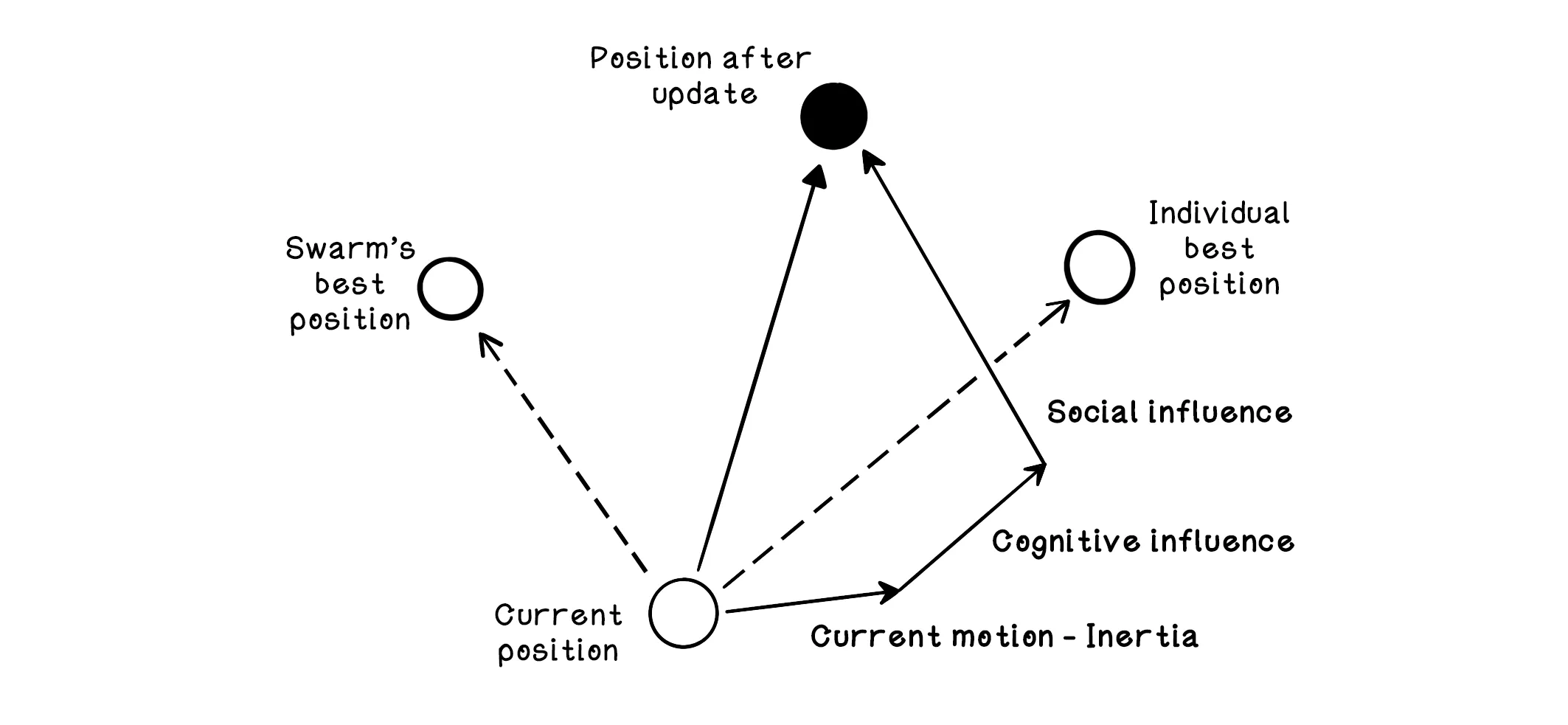
Three components are used to calculate the new velocity of each particle: inertia, cognitive, and social. Each component influences the movement of the particle. We will look at each of the components in isolation before diving into how they are combined to update the velocity and, ultimately, the position of a particle:
Inertia — The inertia component represents the resistance to movement or change in direction for a specific particle that influences its velocity. The inertia component consists of two values: the inertia magnitude and the current velocity of the particle. The inertia value is a number between 0 and 1.
Cognitive — The cognitive constant is a number greater than 0 and less than 2. A greater cognitive constant encourages individual independence (or personal exploration), preventing the particle from blindly following the swarm and ensuring it thoroughly checks the area around its own discoveries.
Social — The social component represents the ability of a particle to interact with the swarm. A particle knows the best position in the swarm and uses this information to influence its movement. Social acceleration is determined by using a constant and scaling it with a random number. The social constant remains the same for the lifetime of the algorithm, and the random factor encourages diversity in favoring the social factor.
Optimize the drone
Start by guessing a good drone design yourself. Adjust the aluminum and plastic values to see whether you can find a stable combination. Then start the PSO simulation and watch what the swarm does differently. Each particle is a candidate design moving through the search space, the chart shows the best score found so far, and the drone panel gives an intuitive feel for how close the current best solution is to the target.
As the run continues, look for the balance between exploration and coordination. Early on, particles scatter and test different regions. Later, they begin clustering around promising areas as the swarm shares information. Particles explore aluminum (x) and plastic (y) mixes to minimize the stability function:
f(x,y) = (x + 2y - 7)² + (2x + 4 - 5)²
This objective function is deliberately simple so the swarm’s behavior is easy to visualize. Real PSO problems can involve many dimensions, noisy measurements, and difficult tradeoffs, but the same social-versus-individual search behavior still drives the algorithm.
Grokking AI Algorithms
How AI solves complex problems
A practical, visual guide to the algorithms that power search, machine learning, neural networks, LLMs, and generative AI.
Particle Swarm Optimization Frequently Asked Questions (FAQ)
What is particle swarm optimization?
Particle swarm optimization, or PSO, is a search method where many candidate solutions move through a continuous space while learning from their own best result and the swarm's best result. It is simple to implement and effective on many optimization problems.
What is a particle in PSO?
A particle is one candidate solution moving through the search space. It has a position, a velocity, and a memory of the best place it has found so far.
What does the swarm's best position mean?
It is the best solution any particle has found up to that point. Each particle is pulled partly toward that shared best-known location.
What do inertia, cognitive, and social terms mean in PSO?
The inertia term keeps a particle moving in a similar direction, the cognitive term pulls it toward its own best position, and the social term pulls it toward the swarm's best-known position. Together they balance exploration and convergence.
Why is PSO good for continuous optimization?
PSO naturally operates on numeric coordinates rather than discrete choices. That makes it a strong fit for tuning parameters, searching smooth landscapes, or solving continuous optimization problems.
Can PSO get stuck in poor solutions?
Yes. Like other heuristic methods, PSO can converge too early if diversity drops too quickly or if the swarm overcommits to a mediocre region of the search space.
When is PSO better than brute force search?
PSO is useful when a problem has too many possible values to test one by one. Instead of exhaustively checking every point, the swarm searches intelligently for strong regions of the solution space.
How is PSO different from a genetic algorithm?
PSO moves candidates through a space using velocity and shared memory, while genetic algorithms evolve populations through reproduction, crossover, and mutation. Both are population-based search methods, but they improve solutions differently.
Why is PSO considered swarm intelligence?
Like flocking or schooling behavior in nature, PSO relies on many simple agents using local rules and shared cues. The useful behavior emerges from the group rather than from one complex decision-maker.
What does the drone analogy help explain?
It turns abstract optimization into a physical picture. Each particle behaves like a drone adjusting its course based on its own experience and what the swarm has collectively discovered.
What should I look for in the chapter demo?
Watch how particle motion changes as a better global best is found. The visual movement makes convergence and exploration much easier to understand.